When you click on links to various merchants on this site and make a purchase, this can result in this site earning a commission. Affiliate programs and affiliations include, but are not limited to, the eBay Partner Network.
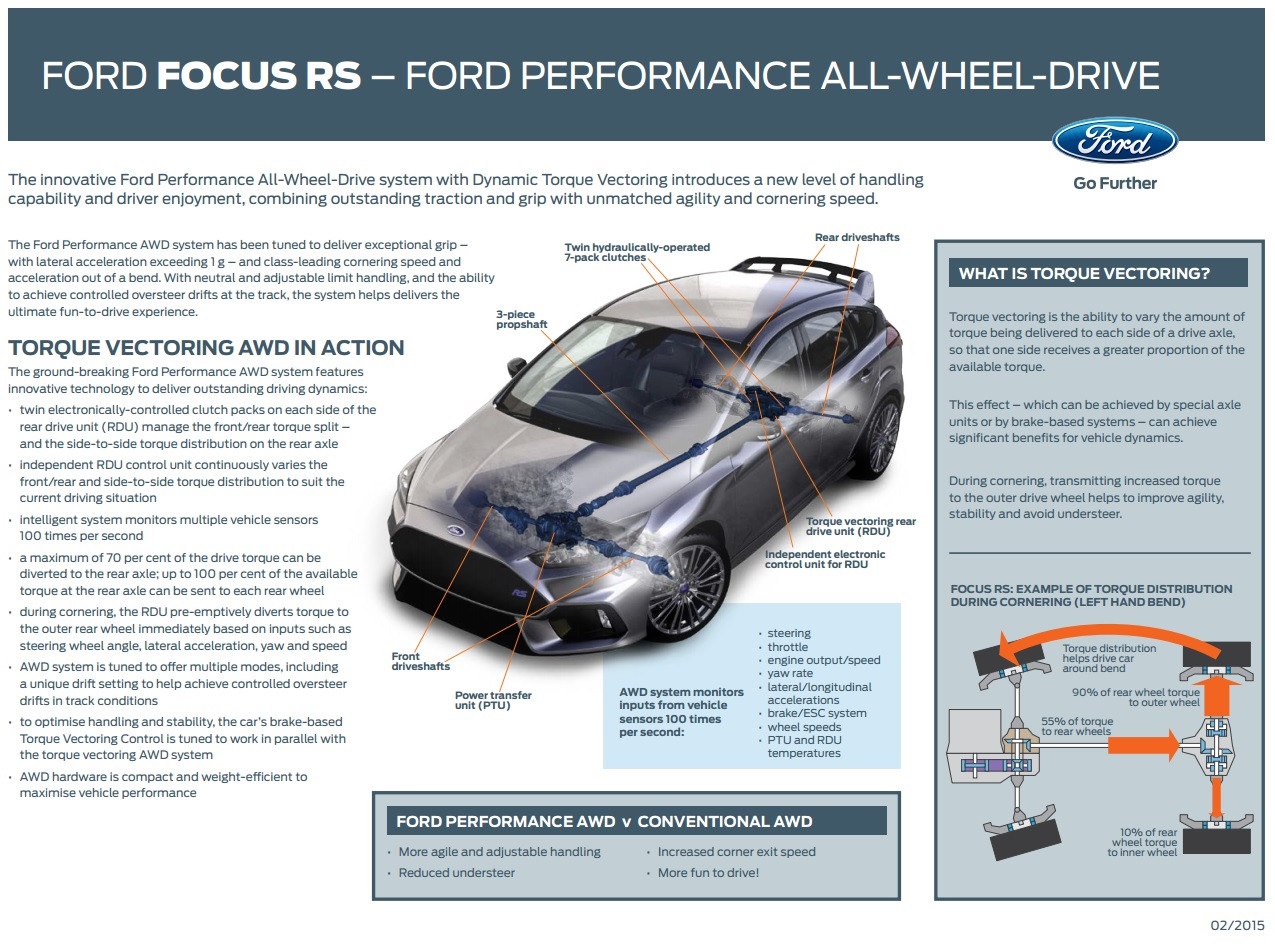
Though this is not from the RC-F, here is a recently published overview of how the Torque Vectoring Differential on the Ford Focus RS will operate:
The manufacturer of this Torque Vectoring AWD system is the same as the one used for the TVD on the RC-F (GKN Driveline). The area of similarity to focus on would be Torque Vectoring Rear Drive Unit (RDU) which is a comparable unit to the RC-F's TVD (The Focus RS uses 7 clutches per side while I believe the TVD uses 8 clutches per side).
Both the Focus RS and RC-F use an ECU to monitor the current driving dynamics of the vehicle in order to determine the appropriate level of torque to distribute to each wheel. For the Focus RS, it can apply a maximum of 70% of available torque to the rear outside wheel (based on the diagram). My assumption is that the RC-F is capable of applying 100% of the available torque to the rear outside wheel (0:100) during a high cornering situation. As noted by DrRick, the lack of Lexus marketing material on the TVD can only lead us to speculate its capabilities, especially in comparison to a Torsen LSD. Theoritically, the TVD should be quite superior to the Torsen since a Torsen requires a slip event to occur before the LSD can apply a predetermined amount of torque to the wheel with more grip (based on its torque bias ratio). The Torsen LSD is considered to be passive while the TVD is active.
The big question is how well the algorithms are established on the TVD ECU in order for it to intelligently calculate the driver's intent when engaging a corner apex. If the settings are not currently optimal, it might take a few revisions to the software for the handling dynamics of the RC-F to fully shine.
In regards to the steady-state cornering question, I would think that the TVD being set to Track mode would allow the RC-F to achieve a higher speed and recorded g-force around a set circle test track. My guess with the differences between the three settings for the TVD would be the progressiveness/aggressiveness to a full lock-up of the clutch packs. Slalom mode would lock up the clutch packs faster and sooner (favoring agility), Track mode would be more progressive (favoring stability), and Normal mode would be somewhere in between.
Though this is not from the RC-F, here is a recently published overview of how the Torque Vectoring Differential on the Ford Focus RS will operate:
The manufacturer of this Torque Vectoring AWD system is the same as the one used for the TVD on the RC-F (GKN Driveline). The area of similarity to focus on would be Torque Vectoring Rear Drive Unit (RDU) which is a comparable unit to the RC-F's TVD (The Focus RS uses 7 clutches per side while I believe the TVD uses 8 clutches per side).
Both the Focus RS and RC-F use an ECU to monitor the current driving dynamics of the vehicle in order to determine the appropriate level of torque to distribute to each wheel. For the Focus RS, it can apply a maximum of 70% of available torque to the rear outside wheel (based on the diagram). My assumption is that the RC-F is capable of applying 100% of the available torque to the rear outside wheel (0:100) during a high cornering situation. As noted by DrRick, the lack of Lexus marketing material on the TVD can only lead us to speculate its capabilities, especially in comparison to a Torsen LSD. Theoritically, the TVD should be quite superior to the Torsen since a Torsen requires a slip event to occur before the LSD can apply a predetermined amount of torque to the wheel with more grip (based on its torque bias ratio). The Torsen LSD is considered to be passive while the TVD is active.
The big question is how well the algorithms are established on the TVD ECU in order for it to intelligently calculate the driver's intent when engaging a corner apex. If the settings are not currently optimal, it might take a few revisions to the software for the handling dynamics of the RC-F to fully shine.
In regards to the steady-state cornering question, I would think that the TVD being set to Track mode would allow the RC-F to achieve a higher speed and recorded g-force around a set circle test track. My guess with the differences between the three settings for the TVD would be the progressiveness/aggressiveness to a full lock-up of the clutch packs. Slalom mode would lock up the clutch packs faster and sooner (favoring agility), Track mode would be more progressive (favoring stability), and Normal mode would be somewhere in between.
TVD on a AWD car is a HUGE difference, I have owned several AWD cars with a like system and you can tell because it can put power to any wheel, with the RCF being only 2WD it's not going to have near the difference. If this RCF was AWD the TVD would be a no brainer but it's not.
Again Ford show's how it works but Lexus leaves us in the dark with details. If they want to be a top tier performance company they need to provide the information to the people who are purchasing these cars.
Finally from the results, TVD main purpose is to enhance vehicle driving by making it more fun to drive, not to enhance paper numbers too much.
The feel it's gives to the car like there is some one push the vehicle from the rear while cornering, backing to main purpose of building this car is " driver feel "
" There�s no question that torque vectoring improves objective performance, yet the strongest selling
point for this differential is how the car feels from behind the wheel. Whether it�s at the limit on the
track or winding down country roads, torque vectoring makes the car livelier and more controllable.
Without it, limit cornering is a trying exercise in traction management, load transfer, and other subtle variables.
The torque-vectoring differential feels like a subtle push from behind. Turn the wheel and the car dives in so
eagerly and effortlessly that you�ll want to attribute its behavior to magnetic forces or supernatural powers.
Or, you might just tell passengers that it�s all due to your peerless driving technique. And isn�t that worth the money? "

 03-07-15 | 10:04 AM
03-07-15 | 10:04 AM